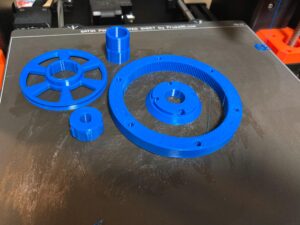
アウター側のギアをPCで印刷しました.
- BearingHoldA.stl
- BearingHoldB.stl
- MainHousing_v2.stl
- MotorCover.stl -> サイズ変更
- MotorHoldA.stl -> サイズ変更
- MotorHoldB_v2.stl
- OutputPlate.stl
- OutputShaft_v2.stl
をPETGで全部2つづつ.
79:1 Harmonic Drive for Keen-One EQから, 共通のもの2つ, V5から4つを印刷します.これも2つづつ
- 160T_CircularSpline.stl (PCで印刷)
- Flexspline_Bearing.stl (PCで印刷)
- 158T_Flexspline_V5.stl (これはPETGで印刷)
- WaveGenerator_V5.stl (PCで印刷)
- Coupler_V5.stl (PCで印刷)
- AssemblyHelper_V5.stl (PCで印刷)
Extender for Stepperonline geared PG27-Stepperから
- OMC_PG27_Extender.stl(寸法を変更)
(いくつかパースの寸法を変えました.データはどこかでUPします)
ベアリング,コネクタ関連
- 6812ZZ Bearing-60x78x10 2個
- 6807ZZ Bearing-35x47x7 2個
- 17HS4401S-PG X1PCS, Ratio 27-1 2個
- Gx12航空プラグ オスメス 2個づつ
- Gx12ケーブル 2本
- 5mm ボール 88個
ネジ関連(ちょっと自信なし.今度再確認するけど,メモ)
- M3 6mm 4本
- M3 10mm 2本
- M3 12mm 12本
- M3 15mm 12本
- M3 30mm 8本
- M3 ナット 14個
- M4 25mm 12本 (私が20mmから一部変更.だけど微妙?)
- M4 30mm 8本 (Lukeさんがオリジナルから変更)
- M4 35mm 12本
- M4 45mm 8本 (40から修正)
- M4インサートナット 24個
- M4 ナット 40個
- M6 ナット 4個
- M8 薄型(5mm) 4個
クランプも印刷で作りました.精度に影響がでるかは後から検証しましょう.
Polar Fine Adjustment UnitにあるクランプとMaestroさんが作成した“Add Reinforced Edge“を使わせてもらいます.
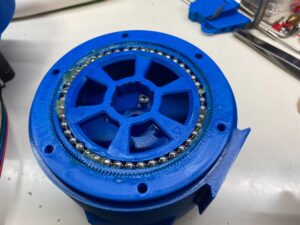
組み込んだところ

スペーサーを調整

取り付けた状態

微動雲台
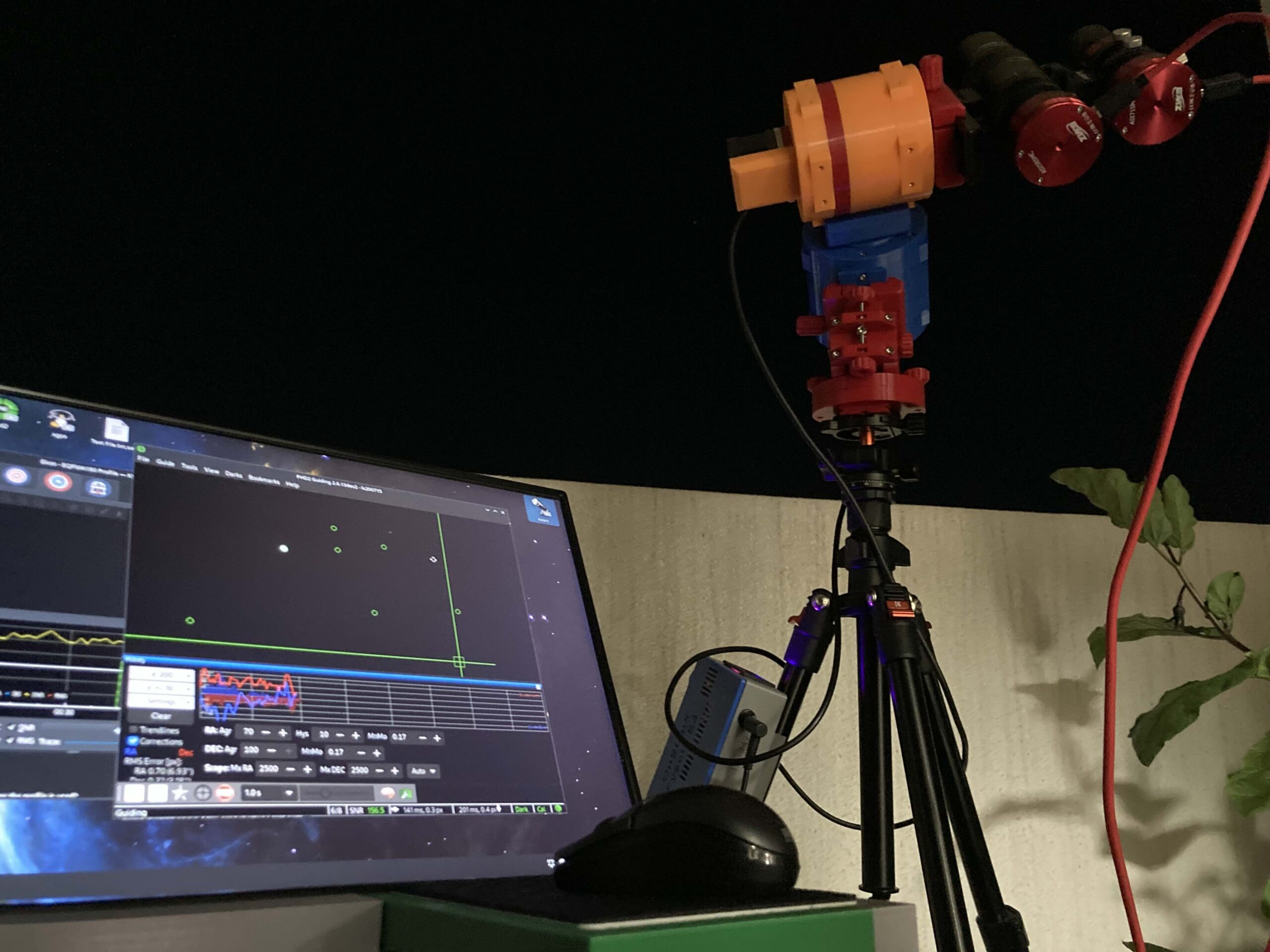
制御用にはOnstepを使いますが,3Dプリンタ用の制御ボードを流用しています.ステピングモーターの駆動電圧は使っていないPCのアダプタを流用して19Vにしています.電流容量が足りているか,モーターに電流流しっぱなしになっていないか確認するために電流,電圧計をケースに組み込んでいます.
Onstepの設定ファイルはLukeさんの公開されているヘッダファルが参考になると思います.Stepper Stepsは200, Microstepsは16, GR1のギアは26.85(データシートから), GR2は79としています.Onstepの計算シートからSTEPS_PER_DEGREEは18854.66667, STEPS_PER_WORMROTは85920としています.

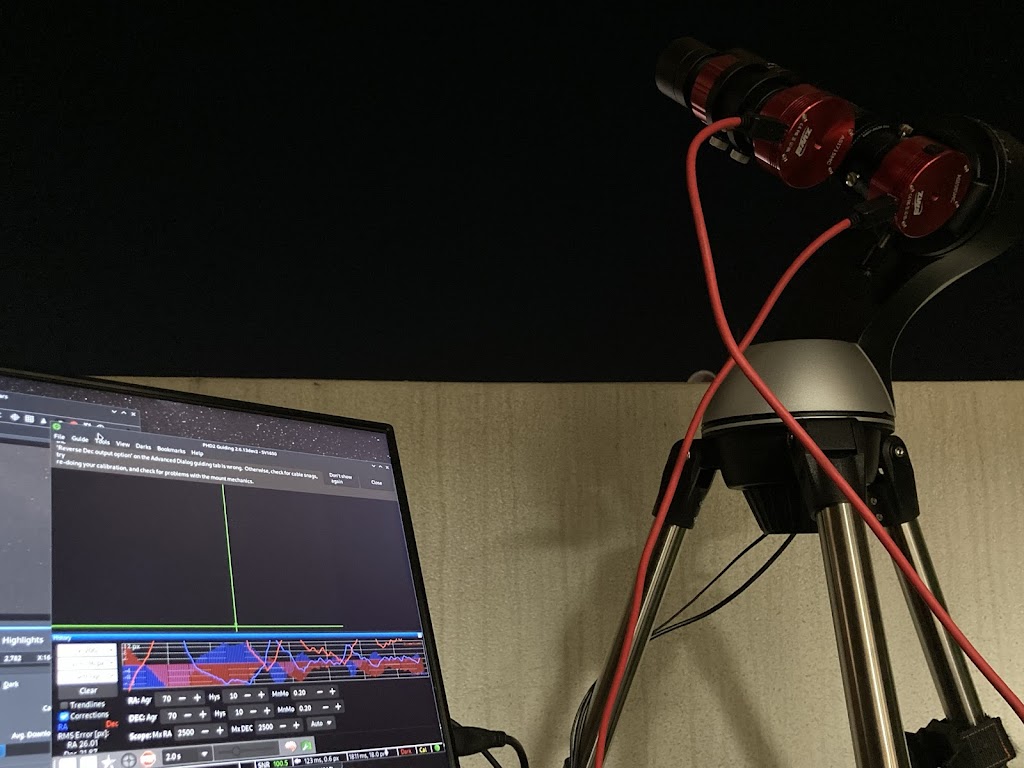
こんな感じ.望遠鏡はFMA-180 ProとSV165の30mmを繋いでいます.さて,きちんと動かすことができるでしょうか.
改めてKenさん,Lukeさんに感謝申し上げます.

コメント